|
I work on machine learning aspect of robotics and am building humanoids at Hexagon. I received my master degree in robotics at ETH Zurich and my bachelor degree in mathematical mechanics at Peking University. I also hold on bachelor degree in economics at Peking University. I like triathlon and outdoor activities. I am also a casual photographer. |

|
|
Here is a few projects I have worked on. |
|
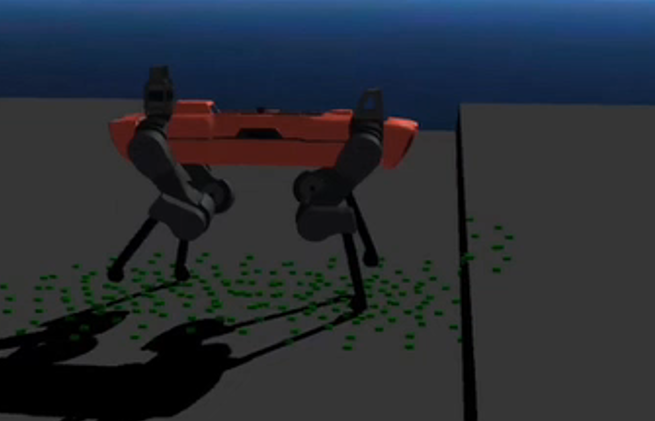
Chao Ni, Alexander Reske, Takahiro Miki, Marco Hutter video / thesis Leveraging demonstrations from MPC expert, the robot learns to walk over structured terrains. |
||||||||||||
|
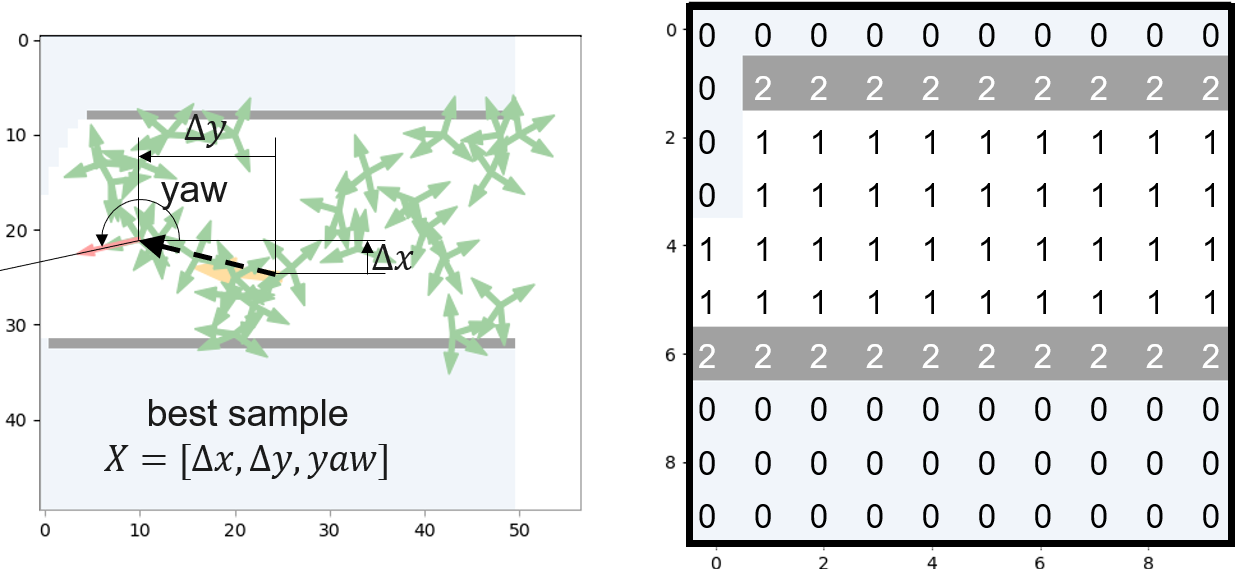
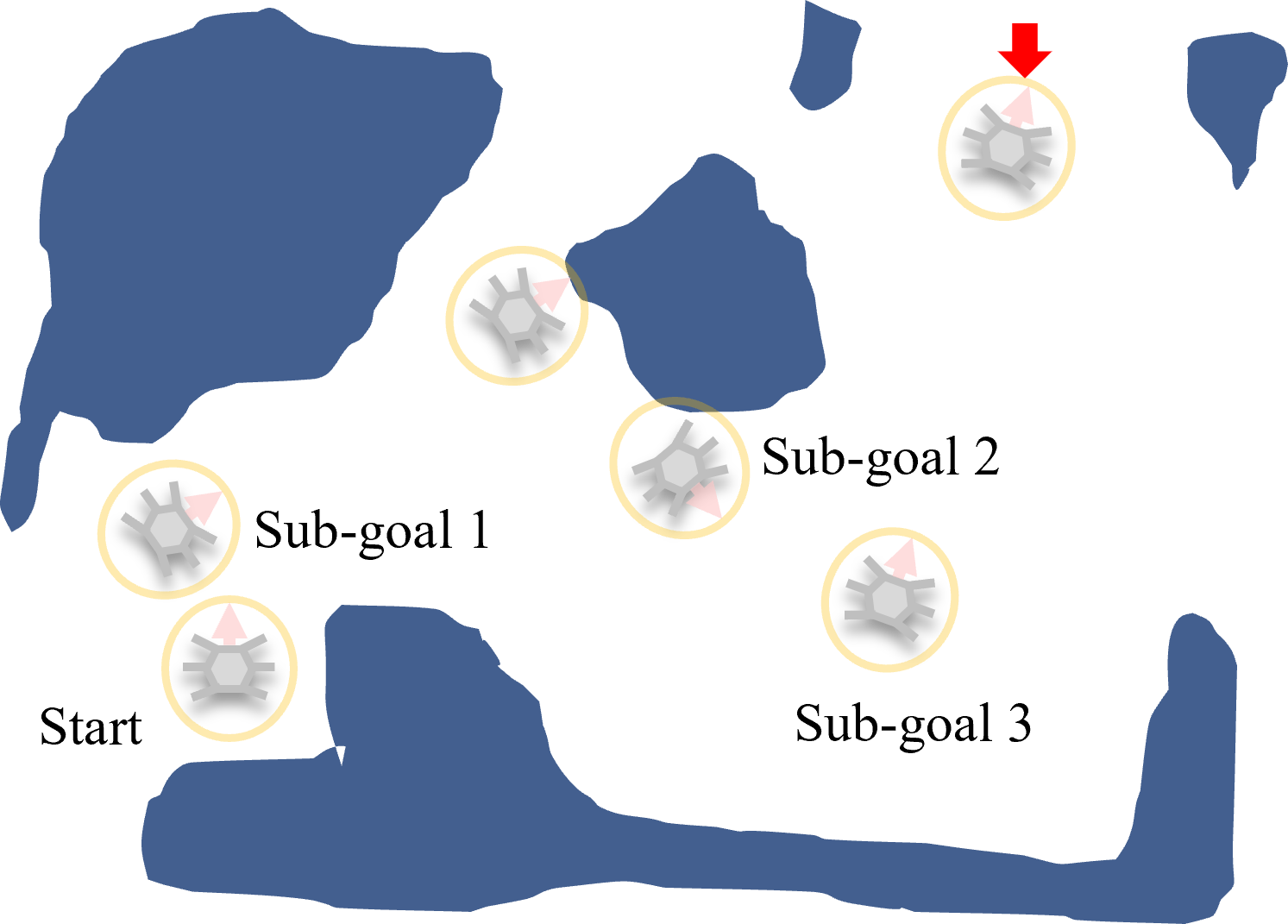
Lukas Schmid*, Chao Ni*, Yuliang Zhong, Roland Siegwart, Olov Andersson *equal contribution Robotics and Automation Letters (RA-L) & IROS, 2022 project page / video / arXiv / code By learning the distribution of optimal samples given a local map, sampling-based exploration planning can be done efficiently. |
|
Here is a list of my past projects, including course projects and unpublished work. |
|
Chao Ni, Matthias Müller, Davide Scaramuzza Learning to navigate in the forest using only a monocular event camera. |
|

|
Chao Ni semester thesis report / code We create a motion primitive library with trajectories generated by modulizable optimizers and use Model Predictive Control to track the trajectory. |
|
|
Chao Ni, Kaiyue Shen, Ji Shi course project video / code Inverse Kinamtics solver for the hexpod robot is implemented, simple PD feedback is used for torque control. An obstacle avoidance algorithm is used to achieve navigation tasks. |
|
|
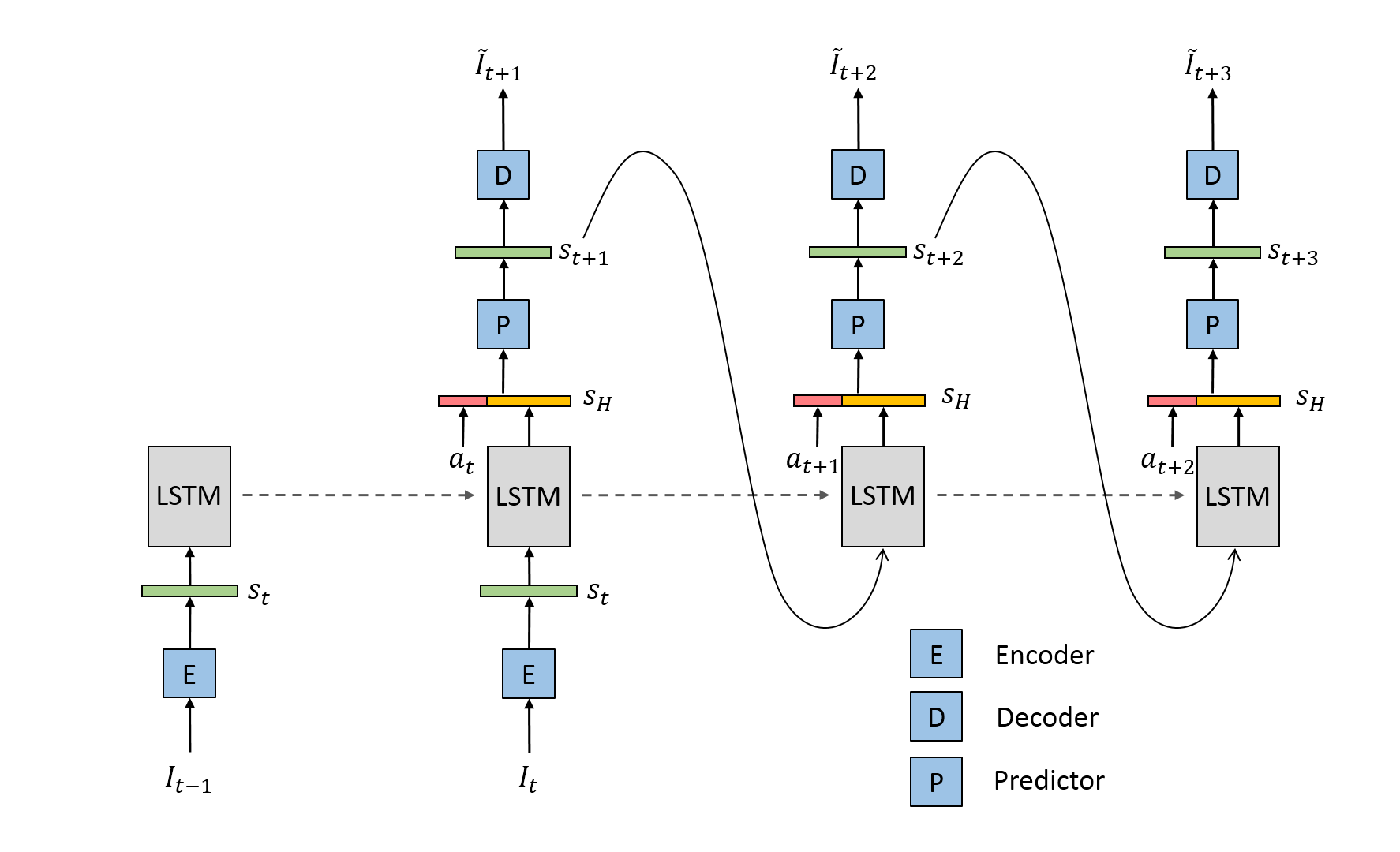
Chao Ni undergraduate thesis report We extract effective representation from the multi-sensory robotics data by self-supervised synchronization and use the latent representation for downstream RL tasks.
|
|
|
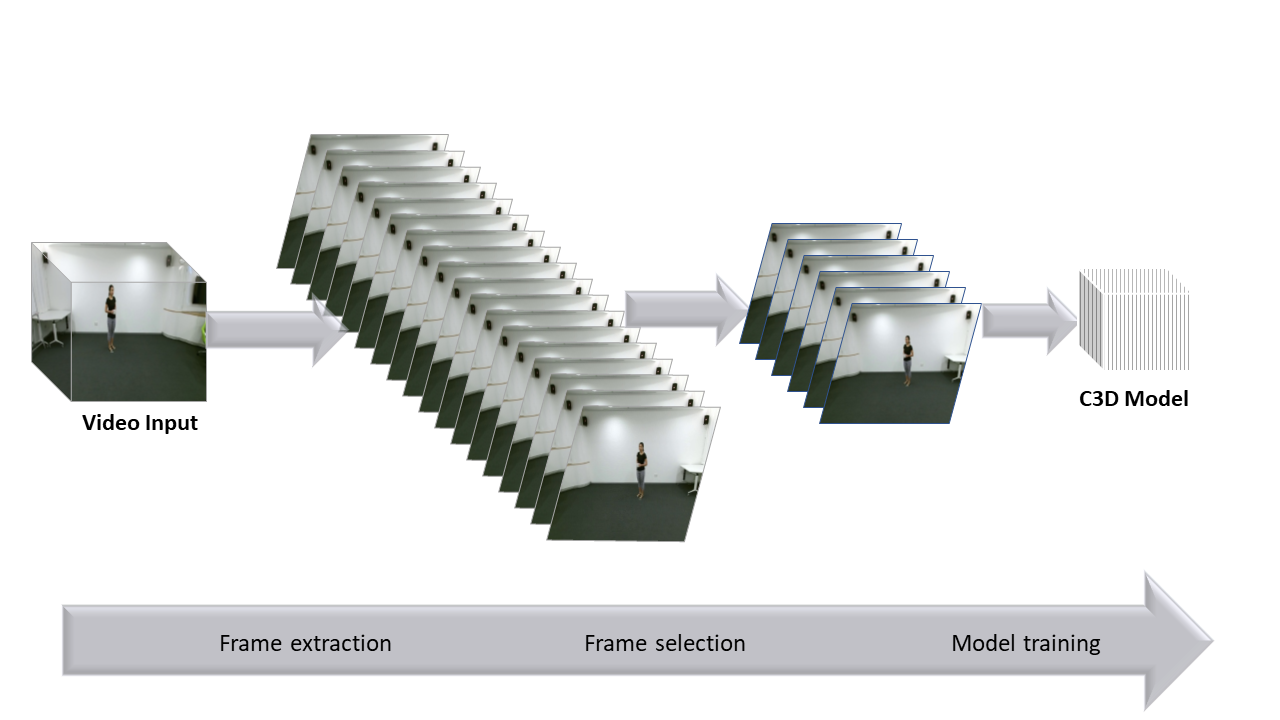
Chao Ni unpublished research (Johns Hopkins University, advisor: Gregory Chirikjian) report We quotient out the temporal fluctuations of the video and insert a preprocessing frame selection layer in the action recognition learning framework.
|
|
Here is a list of my personal literature reviews and pointers to some of my passions. A literature review on Robot Learning: robot learning |